Gyrocopter with wifi and cam
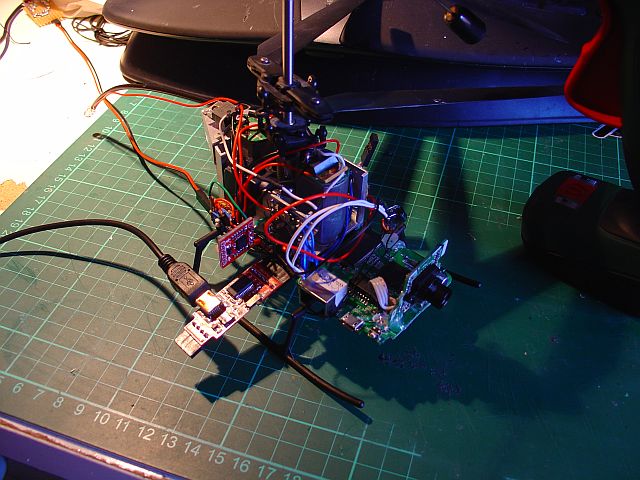
Long gone is this cheap ass gyrocopter. I removed the normal electronics and added an TP-Link WR703N, which is an very small and ultra hackable wifi travel router with usb, i2, isp, serial and several gpios. The copter had an imu solution (hooked up via i2c) and Video latency was about 400ms (which is not so good), but the copter could be controlled via udp packets sent from a python-script that did the readout of the controller below. Plus ssh'ing into a currently flying machine is always nice. Pid-tuning over ssh was super easy, because when you anchor the machine to the floor and give a little extra throttle it's hard to crash.The copter was relatively stable (pid-only, no kalman) but had a fatal bug which would result in maximum yaw to the right and quick attitude loss. I could never find that bug despite the immense debugging capabilities a ssh-able copter offers.
The only surviving photo of the copter
The only surviving photo of the usb remote control i built for the copter. right side has pitch, roll and yaw control all in one, a thing i preferred at the time.
 ⎆home
⎆top
⎆home
⎆top