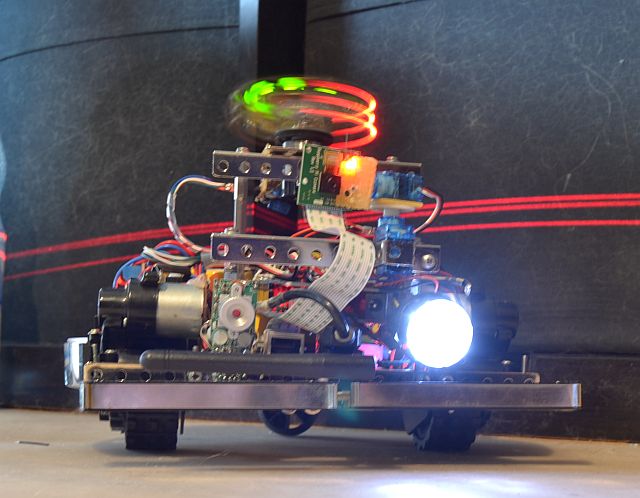
the autonomous robot dr.floyd 2
Successor of the dr.floyd v1 robot. This version is much more advanced.- Powered by ROS (robot operating system)
- Better navigation: homebrew LiDAR laser scanner, 1 Hz speed, full 360° scan, max. Range 2m, centimeter resolution
- Smaller: 20x12cm size, can do in-spot rotation
- Better runtime: 3 hour battery runtime, drfloyd2 can automatically locate and use the charging station
- More CPU power: 1Ghz/ARM6 + 1.2Ghz/ARM7 on Board
- More stuff: 2 cameras, IMU, compass, 5 lasers
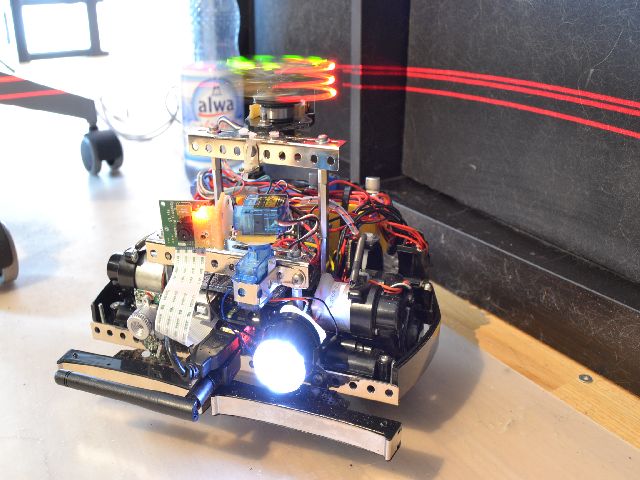
Dr.Floyd2 is a test bed for various robotic things like SLAM. Thanks to improved sensors and processing power navigation and docking is now working reliably.
The robot has built-in speakers and has camera videostreams (including audio) available. It's also acting as an wifi access point and can be controlled from a html5 heavy webpage that runs on most smartphones.
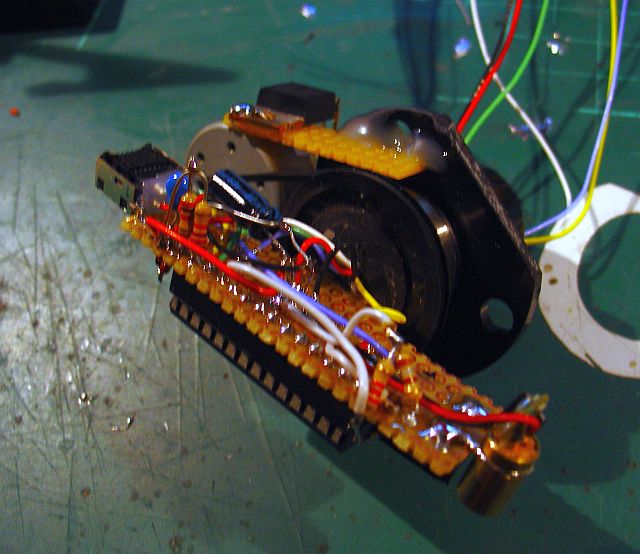
lidar is basically an avr with a hacked omnivision sensor, an 3mW ir-laser and a motor from an old dvd burner
Closeup of the lidar.
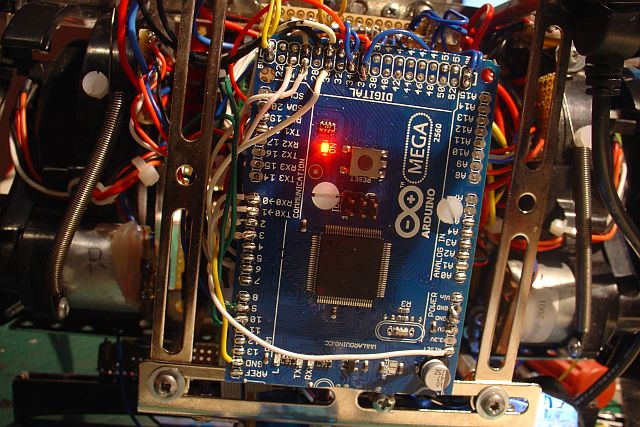
this atmega2560 is connected via rosserial, does sensor/actuator stuff and motor-pid. usb-part was cut off by me (broken), avr is programmed from the main arm cpu via isp. reset via avrdude, strace, piping and gpio hack.
You can see the laserdiode for the old collision detection system on the bottom. drfloyd2 can utilise this on the fly if the robot is docking or the lidar-data has low credibility.
 ⎆home
⎆top
⎆home
⎆top