Schäuble Junior
Multifuncional servo controlled camera array with 9 pan/tiltable cameras, one overhead 360° camera for calibration purposes, 9 microphones, 4 line lasers, pwm-controlled ir-led illumination, speaker with amplifier, arduino controlled, heavily modified 2*4+6 usb port switch- 360° * 140° panoramic shot in 6 seconds (!)
- 360° video recording (currently 19..20 fps, working on that)
- 9 channel microphone array, each with it's own soundcard
- piezo speaker for echolocation experiments

overview. the small robot below is a different project.
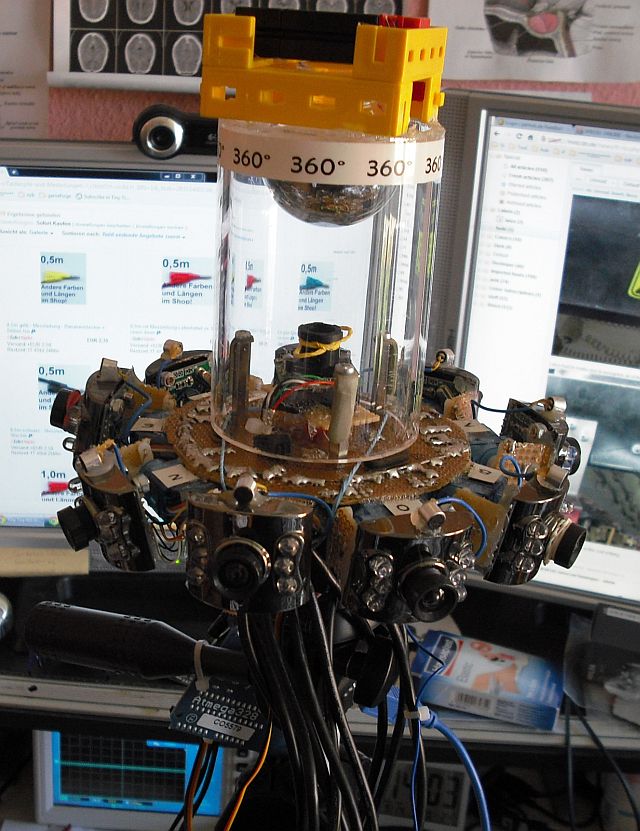
cameras, calibration camera, microphones, and vertical servos up close.

totally hacked up usb-hub with 9 attiny45 to keep the cameras shooting at all times.

Demoshot (click to see the original), forgot to adjust the focus of the cameras, thus some unsharp areas
"Stitching" is done in opengl, using ultrastupid polarbased matrix- operation, overlap-detection by simple edge-detection after sobel. Does not work too well on uniform colored pictures, but it's very fast. Camera detection/calibration is needed to find out camera order and orientation. Uses libusb.
I don't know yet what to do with this monster, except occasional party panorama shots. I just had the feeling i needed to build something like this ;) ⎆home ⎆top